A Relialble Approach to Compute the Forward Kinematics of Ro
ABSTRACT:Uncertainties widely exist in engineering structural analysis and mechanical equipment designs, and they cannot always be neglected. The probabilistic method, the fuzzy method and the interval method are the three major approaches to model uncertainties at present. By representing all the uncertain length and the uncertain twist of the link parameters, and the uncertain distance and the uncertain angle between the links as interval numbers, the static pose (position and orientation) of the robot end effector in space was obtained accurately by evaluating interval functions. Overestimation is a major drawback in interval computation. A reliable computation approach is proposed to overcome it. The presented approach is based on the inclusion monotone property of interval mathematics and the physical/real means expressed by the interval function. The interval function was evaluated by solving the corresponding optimization problems to determine the endpoints / bounds of every interval element of the solution. Moreover, an intelligent algorithm named as real-code genetic algorithm was used to locate the global optima of these optimization problems. Before using the present approach to determine the response interval of uncertain robot system, some mathematical examples were used to examine its efficiency also.
Key words: robot kinematics; interval analysis; global optimization; uncertain geometry parameter
Introduction
When computing the robot forward kinematic, the nominal values for the link and joint parameters provided in the user manuals are used. Due to the manufacturing tolerance, the assembling error and part wear, the actual values for the kinematic parameters are always different from the given one. So the actual working envelop is different from the one reading from the robot controller computing with the nominal parameters. The Monte Carlo method is applied in a statistic way, but the computation is time-consuming to emulate all states [1].
The probabilistic method, the fuzzy method and the interval method are the three major approaches to model uncertainties at present [3]. Probabilistic approaches are not deliver reliable results at the required precision without sufficient experimental data to validate the assumptions made regarding the joint probability densities of the random variables or functions involved [4]. When the fuzzy-set-based approach is used, sufficient experimental data are needed to determine the subject function also. As to obtain these sufficient experimental data is so difficult and expensive in some engineering cases, analyzers or designers have to select the probability density function or the subject function subjectively. In this situation, the reliability of the given results is doubtable. A realistic or natural way of representing uncertainty in engineering problems might be to consider the values of unknown variables within intervals that possess known bounds [2]. This approach is so called interval method (or interval analysis).
In the last 20 years, both of the algorithmic components of interval arithmetic and their relation on computers were further developed. However, overestimation of an interval function is still a major drawback in interval analysis.
By representing uncertain geometric parameters as interval numbers, this paper presents a novel approach to compute the forward kinematics of robot by solving a series of interval functions. And a reliable approach to evaluate the interval functions’ values was proposed also to obviate overestimation, the major drawback in interval computation. In this approach, these interval functions were estimated by solving a series of global optimization problems. An intellective algorithm named as real-code genetic algorithm was used to solve the optimization problems also. Numerical examples were given to illustrate the feasibility and the efficiency.
the interval computational model to compute the forward kinematics of robot with uncertain geometric parameters
(1) Determinate computational model of robot
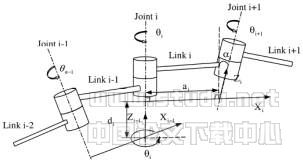
Fig. 1 D-H convention for robot link coordinate system
The robot kinematic model is based on the Denavit-Hartenberg (DH) convention. The relative translation and rotation between link coordinate frame i-1 and i can be described by a homogenous transformation matrix, which is a function of four kinematic parameters ![]() ,
, ![]() ,
, ![]() and
and ![]() as shown in Fig. 1.
as shown in Fig. 1.
The homogenous transformation Ai is given in Eq. (1)
![]()
 (1)
(1)
Using the homogenous transformation matrix the relationship of the end-effector frame with respect to the robot base frame can be represented as in Eq. (2):
![]()
![]() (2)
(2)
(2) The robot kinematic model using parameters with interval uncertainty
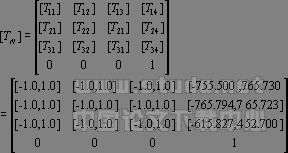
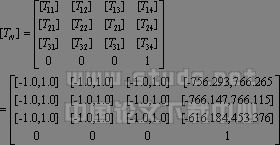
When the kinematic parameters θi, di, αi, ai have no fixed value but having the values falling in the intervals [θi], [di], [αi], [ai] randomly, expanding the Eq. (2) with the intervals, we get,
![]() (3)
(3)
with
solution of the interval computational model of robot with uncertain geometric parameters
(1) Brief review of some definitions and properties in interval mathematics [7-8]
For two interval number ![]() and
and ![]() , (
, (![]() ,
,![]() is the set of real compact intervals), the interval arithmetic was defined as follows.
is the set of real compact intervals), the interval arithmetic was defined as follows.![]() ,
,![]() ,
,![]() and
and ![]()
![]() (for
(for![]() ).
).
If ![]() , then the interval
, then the interval ![]() degenerates to a real number a, i.e.
degenerates to a real number a, i.e. ![]() . In this way, interval mathematics can be considered as a generation of real numbers mathematics. However, only some of the algebraic laws, valid for real numbers, remain valid for intervals. The other laws hold only in a weaker form. For example, a non-degenerate interval
. In this way, interval mathematics can be considered as a generation of real numbers mathematics. However, only some of the algebraic laws, valid for real numbers, remain valid for intervals. The other laws hold only in a weaker form. For example, a non-degenerate interval ![]() has no inversion with respect to addition or multiplication. Even the distributive law has to be replaced by the so-called subdistributivity
has no inversion with respect to addition or multiplication. Even the distributive law has to be replaced by the so-called subdistributivity
![]() (4)
(4)
Let ![]() be given by a mathematical expression
be given by a mathematical expression ![]() , which is composed by finitely many elementary operations
, which is composed by finitely many elementary operations ![]() and standard functions
and standard functions ![]() . The following inclusion monotone holds.
. The following inclusion monotone holds.
![]() for
for ![]() (5)
(5)
where,f([x]) ![]() .As
.As
![]() (6)
(6)
whence
![]() (7)
(7)
Where ![]() .
.
(2) A new approach to evaluate interval functions
Overestimation is a major drawback in interval computation. Based on the inclusion monotone relation (7) and the physical/real means expressed by the interval function, a new approach to evaluate interval functions was proposed in this work.
Relation (7) is the fundamental property on which nearly all applications of interval arithmetic are based. It shows that it is possible to compute lower and upper bounds for the range over an interval by using only the bounds of the given interval without any further assumption.
Obviously, the true value of ![]() is existing and unique.
is existing and unique. ![]() means the range of
means the range of ![]() over
over ![]() . One of the original idea to introduce the interval function
. One of the original idea to introduce the interval function ![]() is to evaluate the range of the value of the function
is to evaluate the range of the value of the function ![]() when the variable
when the variable ![]() changes in the range of
changes in the range of ![]() in a statement of interval way. However, because only some of the algebraic laws which valid for real numbers hold only in a weaker form for interval numbers, the computational results of
in a statement of interval way. However, because only some of the algebraic laws which valid for real numbers hold only in a weaker form for interval numbers, the computational results of ![]() depends on the calculating order severely, and they are often larger than the value of
depends on the calculating order severely, and they are often larger than the value of ![]() . A number of literatures took efforts on finding the skills to obtain the better results of
. A number of literatures took efforts on finding the skills to obtain the better results of ![]() . And some valuable rules were found. For example, (1) If each variable
. And some valuable rules were found. For example, (1) If each variable![]() ,
, ![]() , occurs at most once in
, occurs at most once in ![]() , then
, then ![]() ; (2) To make the most of the subdistributivity, i.e., to execute the addition and subtraction operation first, to execute multiplication and division operations then. For instance, the better result of the polynomial
; (2) To make the most of the subdistributivity, i.e., to execute the addition and subtraction operation first, to execute multiplication and division operations then. For instance, the better result of the polynomial ![]() can be obtained through computing its reformed form
can be obtained through computing its reformed form ![]() . However, the similar results to improve the results of a rational function
. However, the similar results to improve the results of a rational function ![]() have not been found.
have not been found.
In fact, the best result of ![]() can be obtained through calculate
can be obtained through calculate ![]() directly. The bounds of
directly. The bounds of ![]() can be obtained through solving the following two optimization problems.
can be obtained through solving the following two optimization problems.
 (8)
(8)
 (9)
(9)
It is clear that the optima indicated in optimization problem (8) and optimization problem (9) refer to the global optima of ![]() in
in ![]() . When
. When ![]() is monotone in
is monotone in ![]() , there are only one local maximum and one local minimum of
, there are only one local maximum and one local minimum of ![]() , they are the global maximum and the global minimum of
, they are the global maximum and the global minimum of ![]() in
in ![]() respectively. Many optimization algorithms (for example, Newton algorithm, Nowton-Raphson algorithm, Gauss Newton algorithm, etc) that only can locate the local optima of the problems could be used. However, when the expression
respectively. Many optimization algorithms (for example, Newton algorithm, Nowton-Raphson algorithm, Gauss Newton algorithm, etc) that only can locate the local optima of the problems could be used. However, when the expression ![]() is not monotonic in
is not monotonic in ![]() , or the monotone property is unknown, the global optimization method that has good capability to locate the global optima of
, or the monotone property is unknown, the global optimization method that has good capability to locate the global optima of ![]() in
in ![]() is needed.
is needed.
In this work, a real-code genetic algorithm is used to locate the global optima of optimization problem (8) and (9). It can be briefly described as: (1) The fitness function of individuals is defined by ![]() and
and ![]() for minimum and maximum problems respectively.
for minimum and maximum problems respectively. ![]() and
and ![]() respectively are the maximum and the minimum of
respectively are the maximum and the minimum of ![]() in he generations up to now. The Goldberg’s linear scaling formulation
in he generations up to now. The Goldberg’s linear scaling formulation![]() (
(![]() ) is used also for fitness scaling [9]. (2) The proportional selection model was used. (3) The arithmetic crossover operator [10] was used. (4) Both of the non-uniform mutation operator [10] and the boundary mutation operator [10] were used in this study. (5) The elitist strategy was used to add the best individual in the previous population to the next generation, in place of its worst individual. (6) A maximum number of generations
) is used also for fitness scaling [9]. (2) The proportional selection model was used. (3) The arithmetic crossover operator [10] was used. (4) Both of the non-uniform mutation operator [10] and the boundary mutation operator [10] were used in this study. (5) The elitist strategy was used to add the best individual in the previous population to the next generation, in place of its worst individual. (6) A maximum number of generations ![]() is specified for stopping the evaluation.
is specified for stopping the evaluation.
(3) Mathematic examples to examine the presented approach
Example 1. Consider the polynomial function ![]() in the interval
in the interval ![]() =[-5,5].
=[-5,5].
Fig. 2 the graph of f(x) However, the solution Numerical examples The nominal parameters for MOTOMAN SV3 industrial robot were shown in Table 1. Table1 Design parameters of MOTOMAN SV3 robot Link coordinate system a /mm α /℃ d /mm θi / ° 1 150 -90 0 -170~ 170 2 260 0 0 -45~ 150 3 60 -90 0 -70~ 190 4 0 90 260 -180~ 180 5 0 -90 0 -135~ 135 6 0 0 90 -350~ 350 Based on the nominal (design) kinematic parameters those were shown in Table 1, the end-effector working envelope can be calculated as follows by the presented method in this paper. Due to the tolerance and manufacturing error, 0.1% of the design value is taken for every kinematic parameter as the parameter deviation from the nominal one, that is, the value is fall in the interval [1-0.05%,1+0.05%] after normalization. The actual working envelop for the robot end-effector could be obtained as following shows by using the presented method. Conclusion and remarks By representing all uncertain geometric parameters, a new approach to determine the static pose (position and orientation) of the robot end effector in space was proposed through evaluating interval functions. A reliable computation strategy to is proposed also to overcome overestimation, the major drawback in conventional interval computation. Parameters with interval uncertainties instead of fixed values are used to compute the forward kinematic. In this way, the actual robot end-effector envelop can be determined, which is essential for the robot off-line programming, obstacle autonomous avoidance, etc. In most cases, the error distribution should be identified, that is, with known end-effector position error to determine the robot kinematic parameter deviation. It is important for the robot calibration and robot production. Using the interval theory to solve this problem inversely is ongoing. ACKNOWLEDGEMENTS The research reported in this paper was supported by China Postdoctoral Science Foundation and the National Nature Science Foundation of China (10072014). Reference 1 Xu W L. Monte Carlo technique for workspace analysis of robot manipulator. Journal of Southeast University, 1990, 20(1): 1-8. 2 Gong C H. Nongeometric error identification and compensation for robotic system by inverse calibration, International Journal of Machine Tools & Manufacturing, 2000,40: 2119-2137. 3 Wang D G. Nonlinear inversion algorithms and their applications (Ph. D Dissertation). Dalian: Dalian university of technology, 2001. (in Chinese) 4 Chen S H, Yang X W. Interval finite element method for beam structures. Finite elements in analysis and design, 2000, 34:75-88. 5 Zhang J Y, Shen S F. Interval analysis method for determining kinematic solutions of mechanisms. Chinese Journal of Mechanical Engineering, 1991,27(2):75-99. (in Chinese) 6 Alefeld G, Herzberger J. Introduction to interval computations. Academic Press, New York. 1983. 7 Alefeld G, Claudio D. The basic properties of interval arithmetic, its software realizations and some applications. Computers and Structures, 1998, 67:3-8. 8 Goldberg D E. Genetic algorithms in search, optimization and machine learning. Reading, MA: Addison-Wesley, 1989. 9 Michalewicz Z. Genetic Algorithm+Data Structures=Evolution Programs. Springer-Verlag, Berlin Heidelberg. 1996.
The figure of ![]() was showed in Fig.2. It is to see from Fig.2 that
was showed in Fig.2. It is to see from Fig.2 that ![]() is not monotonic in [-5, 5]. The global minimum and the global maximum value of
is not monotonic in [-5, 5]. The global minimum and the global maximum value of ![]() in
in ![]() are
are ![]() and
and ![]() respectively. Whence
respectively. Whence ![]()
![]() . The accurate result
. The accurate result ![]() could be easily obtained by using the present method.
could be easily obtained by using the present method. ![]() was obtained by directly using the interval arithmetic operations. A better result,
was obtained by directly using the interval arithmetic operations. A better result, ![]() , was obtained by using the reformed form
, was obtained by using the reformed form ![]() .
.