基于遗传算法改进的BP神经网络加热炉控制系统参数优化
来源:岁月联盟
时间:2010-08-30
1 引言
由于常规PID控制具有鲁棒性好,结构简单等优点,在控制中得到了广泛的应用。PID控制的基本思想是将P(偏差的比例),I(偏差的积分)和 D(偏差的微分)进线性组合构成控制器,对被控对象进行控制。所以系统控制的优劣取决于这三个参数。但是常规PID控制参数往往不能进行在线调整,难以适应对象的变化,另外对高阶或者多变量的强耦合过程,由于整定条件的限制,以及对象的动态特性随着环境等的变化而变化,PID参数也很难达到最优的状态。 神经网络具有自组织、自学习等优点,提出了利用BP神经网络的学习方法,对控制器参数进行在线调整,以满足控制要求。由于BP神经网络学习过程较慢,可能导致局部极小点[2]。本文提出了改进的BP算法,将遗传算法和BP算法结合对网络阈值和权值进行优化,避免权值和阈值陷入局部极小点。2 加热炉的PID控制
加热炉控制系统如图1所示,控制常采用PID控制规律。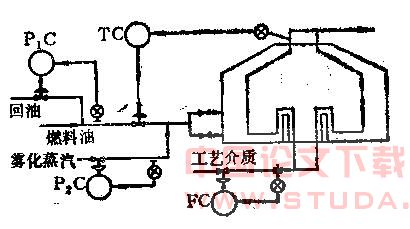 图1 加热炉控制系统简图若加热炉具有的数学模型为:
图1 加热炉控制系统简图若加热炉具有的数学模型为: 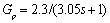 则PID控制过程箭图可以用图2表示。 其中,
则PID控制过程箭图可以用图2表示。 其中,
 采用经典参数整定方法――临界比例度对上述闭环系统进行参数整定,确定PID控制器中 Kp=2.259, Ki=0.869, Kd=0.276。输入为单位阶跃信号,仿真曲线如图3所示。
采用经典参数整定方法――临界比例度对上述闭环系统进行参数整定,确定PID控制器中 Kp=2.259, Ki=0.869, Kd=0.276。输入为单位阶跃信号,仿真曲线如图3所示。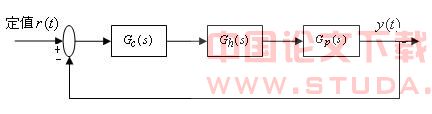 图2 PID控制系统
图2 PID控制系统 图3 Z―N整定的控制曲线 仿真曲线表明,通过Z―N方法整定的参数控制效果不佳,加上PID参数不易实现在线调整,所以该方法不宜用于加热炉的在线控制。
图3 Z―N整定的控制曲线 仿真曲线表明,通过Z―N方法整定的参数控制效果不佳,加上PID参数不易实现在线调整,所以该方法不宜用于加热炉的在线控制。3 基于遗传算法改进的BP神经网络PID控制器参数优化整定
对于加热炉控制系统设计的神经网络自整定PID控制,它不依赖对象的模型知识,在网络结构确定之后,其控制功能能否达到要求完全取决于学习算法。3.1 遗传算法改进的BP算法实现
一般BP网络结构如图4所示,其算法步骤为: (1)输入训练样本,按网络结构得到输出; (2)将实际输出与希望输出比较,得到误差,根据误差调节阈值和权值。重复两个步骤,直到误差满足要求为止;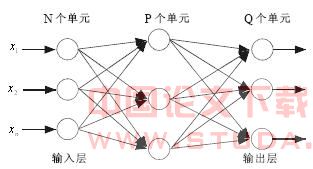 图4 BP网络结构 研究表明,采用上述BP算法逐步调整权值和阈值,可能导致学习过程收殓速度慢,训练时间过长,又易陷入局部极小点而得不到最佳的权值和阈值分布。为了加快学习速率,已经有了一些优化BP算法[3],采用动态学习因子和惯性因子。这些方法在加快收殓速度方面比较显著,能较好地避免网络陷入局部极小。遗传算法不要求目标函数具有连续性,而且可以对复杂的多峰的,非线性及不可微的函数实现全局寻优,因此容易得到全局最优解或性能很好的次优解。将遗传算法和BP算法相结合可以具有寻优的全局性和精确性。算法过程为: (1)对权值和阈值编码生成初始种群,由于是多参数优化问题,采用多参数映射编码; (2)适应度值; (3)如果不满足遗传算法停止条件,则对当代种群进行交叉、选择和变异产生新的个体,转(2);否则,转(4); (4)对遗传算法找到的较好的解空间,采用BP算法在这些小的解空间中搜索出最优解。
图4 BP网络结构 研究表明,采用上述BP算法逐步调整权值和阈值,可能导致学习过程收殓速度慢,训练时间过长,又易陷入局部极小点而得不到最佳的权值和阈值分布。为了加快学习速率,已经有了一些优化BP算法[3],采用动态学习因子和惯性因子。这些方法在加快收殓速度方面比较显著,能较好地避免网络陷入局部极小。遗传算法不要求目标函数具有连续性,而且可以对复杂的多峰的,非线性及不可微的函数实现全局寻优,因此容易得到全局最优解或性能很好的次优解。将遗传算法和BP算法相结合可以具有寻优的全局性和精确性。算法过程为: (1)对权值和阈值编码生成初始种群,由于是多参数优化问题,采用多参数映射编码; (2)适应度值; (3)如果不满足遗传算法停止条件,则对当代种群进行交叉、选择和变异产生新的个体,转(2);否则,转(4); (4)对遗传算法找到的较好的解空间,采用BP算法在这些小的解空间中搜索出最优解。3.2 PID参数优化
由图5可知,神经网络根据系统的运行状态,通过在线调整PID的三个参数 Kp, Ki,Kd ,以达到某种性能指标的最优化。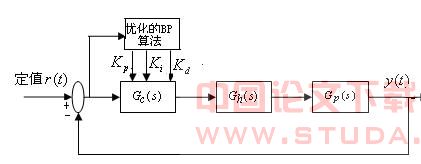 图5 BP网络整定PID参数原理图经典增量式PID的控制算法:
图5 BP网络整定PID参数原理图经典增量式PID的控制算法:
 算法步骤: (1)确定网络结构,采用3―4―3的结构,输入分别为 e(k),e(k)-e(k-1),e(k)-2e(k-1)+e(k-2) 。输出为 Kp, Ki,Kd 。 (2)选择初始种群N=60,交叉概率 Pc=0.08,权值,阈值的范围和初始化。选取目标函数为(偏差绝对值积分):
算法步骤: (1)确定网络结构,采用3―4―3的结构,输入分别为 e(k),e(k)-e(k-1),e(k)-2e(k-1)+e(k-2) 。输出为 Kp, Ki,Kd 。 (2)选择初始种群N=60,交叉概率 Pc=0.08,权值,阈值的范围和初始化。选取目标函数为(偏差绝对值积分): ,适应度函数为:
,适应度函数为:  (3)采样得到rin(k) 和yout(k) ,计算该时刻的误差。 (4)对网络进行学习,在线调整权值,阈值,计算神经网络的各层输入,输出,得到三个可调参数 Kp, Ki,Kd 。计算系统输出。 (5)计算适应度若不满足要求,转入第(3)步。 (6)找到最优的 Kp, Ki,Kd ,对系统仿真。
(3)采样得到rin(k) 和yout(k) ,计算该时刻的误差。 (4)对网络进行学习,在线调整权值,阈值,计算神经网络的各层输入,输出,得到三个可调参数 Kp, Ki,Kd 。计算系统输出。 (5)计算适应度若不满足要求,转入第(3)步。 (6)找到最优的 Kp, Ki,Kd ,对系统仿真。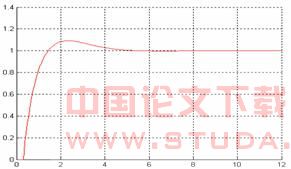 图6 BP网络整定的控制曲线 仿真结果显示,用BP神经网络整定的PID控制系统比经典的Z―N(临界比例度)法有更快的响应特性,良好的动态特性和比较强的鲁棒性。
图6 BP网络整定的控制曲线 仿真结果显示,用BP神经网络整定的PID控制系统比经典的Z―N(临界比例度)法有更快的响应特性,良好的动态特性和比较强的鲁棒性。