多变量模糊控制在城市轨道列车牵引中的应用
摘 要 介绍了城市轨道列车自动变速控制的一种方法 多变量模糊控制。在基本速度模糊控制器的基础上, 加入位移模糊控制和加速度模糊控制,构成多变量模糊控制器。经仿真试验验证,该控制方法控制精度高、速度跟踪性能好、运行安全性高,是一种性能最佳的控制策略。
关键词 城市轨道,列车自动控制,多变量模糊控制,制动控制
为在确保安全的前提下实现城市轨道列车快速和高密度地运行,必须缩短运行间隔,并将自动运行和列车运行管理有机结合起来,也即列车运行自动控制技术。其关键就是发展列车速度自动控制系统。电力牵引的轨道交通列车运行自动控制一般分为三个阶段:出站启动、加速控制到给定速度的第一阶段;匀速,变速或惰行运行的第二阶段;降速、停站制动的第三阶段。三个阶段的自动控制运行各有特色。本文应用多变量模糊控制方法,主要讨论第三阶段运行中的制动控制,实现速度下降快、加速度变化恒定、停车准确、执行机构往返动作频率少的优化控制目标。
1 列车牵引模型
系统的数学模型是依据上海地铁1 号线从德国引进的斩波无级调压供电电动车组。首先建立数学模型,来描述车辆牵引(制动) 系统固有的机电特性及车辆载重、线路阻力等外界影响,然后确立牵引电机起动电流值与磁场削弱系数之间的关系,以及额定牵引电机电压值与车辆速度、加速度、位移等输出值。
1. 1 动车牵引力特性
动车牵引力特性,是指动车轮周牵引力( Fk) 与牵引电机电枢电流( I) 之间的关系,即Fk = N′MIΦ (1) 式中: N 为列车牵引电机台数;Φ为牵引电机主极磁通,Wb ,它由牵引电机的磁化曲线确定; M 为归算后电机转矩常数。
η
′ 2 CMi
CM= (2)
Dk 式中: Dk 为车辆动轮直径,m; i 为齿轮传动比;η为传动装置效率; CM 为牵引电机转矩常数。pN1CM = 2πa(3)
式中: p 为主极对数, N1 为电枢绕组有效导体数; a 为电枢绕组并联支路数。
1. 2 动车速度特性
动车速度特性,是指动车运行速度( v) 与牵引电机电枢电流( I) 的关系,即
Ud= CeΦnd+ IRd+ Ld d I(4)
d t E= CeΦnd (5) 式中: Ud 为牵引电机端电压,V ; Ld 、Rd 分别为牵引电机回路电感与电阻; Ce 为电机常数,定义为pN1Ce= (6)
60 a 式中符号定义同式(3) ; nd 为电机转速,r/ min ,它与动车速度( v) 的关系式为60πDk 1
v= 1000 ind = αnd (7) 式中α为速度与转速转换常数。
1. 3 动车牵引特性
动车牵引特性,是指动车轮周牵引力( Fk) 与动车速度( v) 之间的数学表达式,即d v
F=Fk-f=Fk-f 1 -f 2 -f 3 =m (8)
d t 式中: f 1 为列车基本阻力; f 2 为弯道阻力; f 3 为坡道阻力。此方程一般为非线形方程。
2 多变量模糊控制原理
对于列车牵引系统,要从位移、速度、加速度三方面来考虑。首先要保证列车运行的安全性和到站的精确性,即保证列车运行过程中的最高速度在规定的最高限速以内以及保证列车到站与实际要求的目标停车位置一致。在满足这两点以后,还要考虑列车运行的准点性和乘客乘坐的舒适性。传统的一般模糊控制方法,只能对一个输入变量进行控制。在此,无论是对位移、速度还是加速度进行控制,都无法满足列车运行的这几个指标。所以采用对位移、速度、加速度三个变量进行综合控制的多变量模糊控制方法。
目前,应用一般模糊控制方法的地铁列车自动运行系统通常采用速度跟踪控制方式,即根据给定点的目标速度曲线对列车进行控制。列车控制跟踪给定的目标速度曲线,从而对列车速度、加速度、位移进行控制来达到性能指标的优良。而列车运行控制的目标有:正点性、舒适性、安全性、节能性、速度跟踪性和停车准确性。采用这种速度跟踪的控制方法,虽然可以保证速度跟踪目标速度较好,但是定位精度误差较大且不稳定,控制参数整定困难,而且可能会造成乘客乘坐的不舒适。对于列车控制的几个目标,安全性和速度跟踪性是靠控制速度来达到的, 停位精度是靠控制位移来达到的,舒适性是靠控制加速度来达到的。所以,选用速度、加速度、位移三个量作为这个系统的控制变量对其进行控制。在每个采样点上,获得速度、加速度、位移三个输入量及它们的变化率,对其分别进行模糊化,然后根据控制规则表,得出此时分别对应于三个输入量的控制量,并根据它们对性能指标的重要程度,给以适当的加权系数使之综合,最后得到所需的控制量。
km/ h ;X3 为列车牵引电机电枢电流,A ;Ud 为牵引电机端电压控制量;β为动车运行时阻力,是一个非线性量,它有基本阻力、弯道阻力、坡道阻力、隧道阻力等。
将上式线性化、增量化可得:
Δf= 2 ×0.001322 v= 2βX2 (10) 式中其它量说明如下:v 为速度;M 为列车归算质量,kg ;N 为牵引电机台数;Φ为电机磁化曲线,由Φ = f(I, r) 确定,r为消磁常数,I 为牵引电机电枢电流;Ce 为电机常数;α为速度与转速转换常数; Rd 为牵引电机回路电阻;Ld 为牵引电机回路电感。这是一个非线性的状态方程。
在这里,主要采用地铁列车多变量模糊控制策略来达到多性能指标优化的目标。现主要介绍列车进站停车的运行控制。它是动车最重要的控制之一。
应用多变量模糊控制策略的系统框图如图1 所示。其中f (v) 为给定的停车最佳目标速度曲线, f (s) 为给定的最佳位移曲线,f (a) 为给定的最佳目标加速度曲线,v1 为系统反馈的速度,s1 为系统反馈的位移,a1 为系统反馈的加速度, U 为系统输出的控制量, Y 为系统的输出。
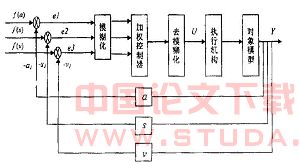
图1 多变量模糊控制策略的系统框图
在控制系统中首先需要对三个输入量,即速度与给定速度差ve 及其变化率、计算位移与给定位移差se 及其变化率、当前时刻加速度与给定加速度的差ae 及其变化率进行模糊化,然后根据这三个输入量分别计算出相应的控制量。分别计算出三个控制量后,就可对三个控制量进行综合运算。
3
U= ∑kiUi
i=1
在得到针对各个输入量的控制量时,要对其加以综合,得到最后的控制量。在这个最后得到的控制量里,包含了速度、加速度、位移的影响。
在上述模型的基础上,按照上海地铁1 号线列车运行模型,从漕宝路站到上海馆站进行了列车运行的数字仿真试验。输入值为上海地铁1 号线列车实际运行过程中的电流百分比控制量,输出值为输入的控制量作用于所建数学模型而得到的速度、加速度和位移。试验分别应用一般经典的PI 控制、一般模糊控制方法和多变量模糊控制方法进行了模拟。其中,在多变量模糊控制方法中,各个参数取值如下:ks = 0.6 ,ka = 0.2 ,kv = 0.2。仿真从漕宝路站到上海体育馆站的运行控制时,多变量模糊控制达到了很好的效果。列车运行时间与时刻表相符合;停车位置距离目标停车点4 cm; 达到的最高速度为76. 8 km/ h ; 最大加速度变化量为-0. 5 m/s3 。其它两种方法的控制效果则远远不如多变量模糊控制方法。
图2 所示的是采用多变量模糊控制对漕宝路站到上海体育馆站这个运行区间进行控制的控制量的变化情况。其中粗实线是多变量模糊控制方法,虚线是一般模糊控制方法,细实线是一般经典的PI 控制。从中看到,PI 控制的控制量的变化最多,幅度也较大;一般模糊控制的控制量变化次数较少,但变化幅度较大一些;而多变量模糊控制则明显优于PI 控制和一般模糊控制。
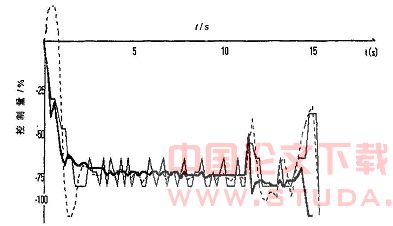
图2 仿真试验的控制量变化情况图
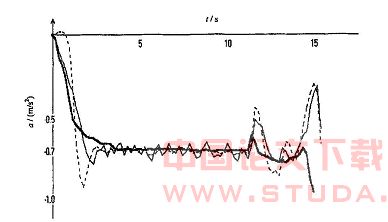
图3 访真试验的加速度变化情况图
参 考 文 献
1 孙章,何宗华,徐金祥. 城市轨道概论. 北京:铁道出版社,1998
2 蔡自兴. 智能控制. 北京:国防出版社,1998. 115~172
3 Lee C C. Fuzzy Logic in Control System. IEEE Trans on Sustem , man and cybernetics , 1990 ,20(2) :404~433
4 窦振中. 模糊逻辑控制技术及其应用. 北京:北京航空航天大学出版社. 1995
5 何平,王鸿绪. 模糊控制器的设计及应用. 北京:出版社,1997. 155~182
6 刘云. 列车运行仿真系统的建模与实现. 铁道学报,1995 年专辑
7 田长海等. 列车动态模拟系统的研究. 中国铁道科学,1995 ,16(1)
8 程隆华等. 上海地铁1 号线车辆牵引(制动) 数字仿真. 上海铁道学院学报,1994 ,(9)
9 毛明平,陶生桂,王曰凡. 上海地铁2 号线牵引仿真计算研究. 城市轨道交通研究,2001 ,(2) :22