D-S证据理论的推广在多传感器信息融合中的应用
来源:岁月联盟
时间:2010-08-30
1 引言
战争中,随着光电干扰技术、隐身技术和反辐射导弹技术的,单一波段或单一制导体制的导引头受到日益严重的战的挑战,其固有弱点和局限性大大降低了制导武器系统的作战效能,甚至难以应付未来复杂恶劣的战场环境和现代高技术战争的需求。多模复合制导可以充分发挥各频段或各制导体制的优势,互相弥补不足,极大地提高了导引头的抗干扰能力和作战效能[1]。 信息融合技术是利用计算机技术对按时序获得的若干传感器的观测信息在一定准则下加以自动分析、优化综合以完成所需要的决策和估计任务而进行的信息处理过程[2]。目前用于信息融合的主要方法之一就是D-S证据理论技术,证据理论能够将多个传感器提供的信息进行融合,从而减少信息的不确定性。本文采用D-S证据理论进行多传感器在时域空域信息融合,并针对紫外传感器有效鉴别红外诱饵的特点,对D-S算法实现过程中存在的失效问题提出了解决方法,对该理论的不足采用了修正的合成规则。2 D-S证据理论概述
D-S证据理论结构的最大特点是在证据中引入了不确定性,建立了基本概率赋值函数(BPAF)、信任函数(BEL)、似真度函数(PL)等满足比概率论弱的公理,放松了传统Bayes理论需要完整的先验概率和条件概率知识以及需要有统一的辨识框架要求,可对相互重叠、非互不相容的命题进行证据组合等特点[3]。 定义1[4~7]: D-S证据理论中最基本的概念是所建立的辨识框架(frame of discernment),记作U。辨识框架U中的元素满足互不相容的条件,命题A对函数m的赋值m(A)是集合 到 的映射,若函数m: 满足下列条件: ① m(Ф)=0; (1) ② 对 (2) 则称m(A)为A的基本概率赋值函数(BPAF)。其中Ф表示空集,m(A)表示对命题A的精确信任程度,表示了对A的直接支持。 定义2[4~7]: 对于给定的基本概率赋值函数m及任一A∈2Ω,定义他所对应的信任函数为:
(2) 则称m(A)为A的基本概率赋值函数(BPAF)。其中Ф表示空集,m(A)表示对命题A的精确信任程度,表示了对A的直接支持。 定义2[4~7]: 对于给定的基本概率赋值函数m及任一A∈2Ω,定义他所对应的信任函数为: (3) 似真函数定义为:
(3) 似真函数定义为: (4) 式中
(4) 式中 。 Bel函数称为下限函数,表示了对命题A的总的信任程度,其中Bel(Ф)=0,Bel(Ω)=1。Pl函数也称为上限函数或不否定函数,表示不否定A的信任度,是所有与A相交的集合的BPAF之和。当证据拒绝A时,Pl(A)等于零,当没有证据反对A时,Pl(A)为1,容易证明Pl(A)≥Bel(A)。[Bel(A),Pl(A)]就表示对A的信任区间。如果辨识框架U的一个子集为A,且m(A)>0,则称U的子集A为信任函数Bel的焦元(focal element)。 这样,信任度和似真度就概括了证据对具体的命题A的关系,它们之间的关系如图1所示,这构成了一个完整的证据区间。
。 Bel函数称为下限函数,表示了对命题A的总的信任程度,其中Bel(Ф)=0,Bel(Ω)=1。Pl函数也称为上限函数或不否定函数,表示不否定A的信任度,是所有与A相交的集合的BPAF之和。当证据拒绝A时,Pl(A)等于零,当没有证据反对A时,Pl(A)为1,容易证明Pl(A)≥Bel(A)。[Bel(A),Pl(A)]就表示对A的信任区间。如果辨识框架U的一个子集为A,且m(A)>0,则称U的子集A为信任函数Bel的焦元(focal element)。 这样,信任度和似真度就概括了证据对具体的命题A的关系,它们之间的关系如图1所示,这构成了一个完整的证据区间。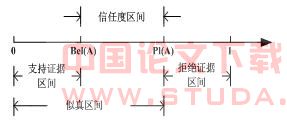 图1 证据区间示意图 D-S证据组合基本规则:设有两个推理系统,它们的基本概率赋值和信任函数分别为m1,m2和Bel1,Bel2,对于子集A,将这两个推理系统的概率赋值合成的D-S规则为:
图1 证据区间示意图 D-S证据组合基本规则:设有两个推理系统,它们的基本概率赋值和信任函数分别为m1,m2和Bel1,Bel2,对于子集A,将这两个推理系统的概率赋值合成的D-S规则为: (5) m所对应的Bel称为Bel1和Bel2的合成或值和,记为Bel=Bel1⊕Bel2。式(4)中的:
(5) m所对应的Bel称为Bel1和Bel2的合成或值和,记为Bel=Bel1⊕Bel2。式(4)中的:
3 D-S证据理论在红外紫外传感器信息融合中的改进
3.1 D-S证据理论的缺点
D-S证据理论具有比较强的理论基础,它既能处理命题的不确定性问题,也能将“不知道”和“不确定”区分开,D-S组合规则的优点在于证据间的冲突较小时,证据置信度向不确定性较小的命题集中。但是,在证据严重冲突的情况下,直接运用基本D-S证据理论进行融合,组合结果往往与实际情况不相符。如下例所示。 例1 已知有辨识框架U={a,b,c},证据1和证据2的目标基本概率赋值分别为
3.2 在红外紫外传感器信息融合中的改进
针对D-S证据理论在发生证据冲突时失效的问题,并结合紫外传感器能有效鉴别红外诱饵的特点,我们对D-S组合规则进行一些修改。同样选用例1中的数据,辨识框架U={a,b,c},其中a代表目标,b代表背景,c代表红外诱饵。 我们将D-S组合规则修改为:如果紫外传感器对诱饵的判别概率大于0.5,且比红外传感器对红外诱饵的判别概率大于二倍以上,即此时红外传感器与紫外传感器在红外诱饵的判决上发生了证据冲突,由于紫外传感器能有效探测出红外诱饵弹的干扰。因此直接将红外传感器对红外诱饵的判别概率增大二倍,而将红外传感器的其他判别概率按比例减小,用公式表示如下, 如果 , 则
, 则  对例1重新计算,得k=7622,m(a)=0.2617;m(b)=0.1495;m(c)=0.5888,很明显,仿真结果更加符合实际。
对例1重新计算,得k=7622,m(a)=0.2617;m(b)=0.1495;m(c)=0.5888,很明显,仿真结果更加符合实际。4 D-S证据理论在时空信息融合中的应用
由于传感器所观测的目标大都是动态的,传感器对目标是周期性连续观测,同时为了获得观测目标尽可能多的观测数据,对多传感器的配置也是按照一定规则和算法,在空间中分布配置的。因此基于D-S证据理论的信息融合,需要在时间域和空间域两个方面进行证据融合,其简要框图如图2所示。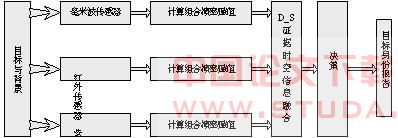
对于每个融合周期,采用D-S证据理论进行时空信息融合的过程如图3所示。
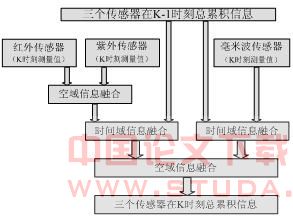 图3 D-S证据理论用于多传感器时-空信息融合 具体的信息融合策略: ①首先将k时刻的红外传感器和紫外传感器的测量信息进行融合。 ②将三个传感器在k-1时刻的累积信息与红外和紫外传感器k时刻的融合结果以及毫米波传感器k时刻的测量信息分别进行融合。 ③对获得的k时刻的累积信息进行空域融合,得到k时刻的最后融合结果。 ④将以上步骤进行递归运算,就可以实现三传感器在N个测量周期的信息融合。 为了验证改进的D-S组合规则在时-空信息融合方法的优劣,利用信息融合中常用的身份识别的例子来进行仿真实验。下面讨论具有相同辨识框架的毫米波、红外、紫外传感器,在三个测量周期的融合情况。三传感器在不同的周期测得的基本概率赋值函数如表1所示。
图3 D-S证据理论用于多传感器时-空信息融合 具体的信息融合策略: ①首先将k时刻的红外传感器和紫外传感器的测量信息进行融合。 ②将三个传感器在k-1时刻的累积信息与红外和紫外传感器k时刻的融合结果以及毫米波传感器k时刻的测量信息分别进行融合。 ③对获得的k时刻的累积信息进行空域融合,得到k时刻的最后融合结果。 ④将以上步骤进行递归运算,就可以实现三传感器在N个测量周期的信息融合。 为了验证改进的D-S组合规则在时-空信息融合方法的优劣,利用信息融合中常用的身份识别的例子来进行仿真实验。下面讨论具有相同辨识框架的毫米波、红外、紫外传感器,在三个测量周期的融合情况。三传感器在不同的周期测得的基本概率赋值函数如表1所示。表1 传感器的测量值
| 红外传感器 | 紫外传感器 | 毫米波传感器 | ||||||||
| 融合周期 | 目标 | 背景 | 诱饵 | 目标 | 背景 | 诱饵 | 目标 | 背景 | 诱饵 | 不明 |
| 第一周期 | 0.6 | 0.2 | 0.2 | 0.2 | 0.15 | 0.65 | 0.4 | 0.2 | 0.3 | 0.1 |
| 第二周期 | 0.6 | 0.25 | 0.15 | 0.25 | 0.15 | 0.6 | 0.3 | 0.1 | 0.4 | 0.2 |
| 第三周期 | 0.7 | 0.15 | 0.15 | 0.2 | 0.2 | 0.6 | 0.3 | 0.25 | 0.3 | 0.15 |
最后分别采用传统的D-S规则以及改进后的D-S组合规则得到三个周期的融合结果列于表2。
表2 融合结果对比
| 传统D-S组合规则 | 改进后D-S组合规则 | |||||
| 融合周期 | 目标 | 背景 | 诱饵 | 目标 | 背景 | 诱饵 |
| 第一周期 | 0.4959 | 0.0744 | 0.4298 | 0.2889 | 0.0433 | 0.6677 |
| 第二周期 | 0.6806 | 0.0003 | 0.3190 | 0.0967 | 0.0003 | 0.9030 |
| 第三周期 | 0.9379 | 0.0000 | 0.0621 | 0.0073 | 0.0000 | 0.9927 |
由表2可以看出,经过三个融合周期,传统的D-S组合规则判断结果为目标,而改进的D-S组合规则判断结果为诱饵,结合传感器的测量值,可以看出改进的D-S组合规则的融合结果更加符合实际。因此改进的D-S组合规则在红外传感器和紫外传感器对红外诱饵发生证据冲突时能得到较好的融合结果,使传感器对红外诱饵的判别概率大大增加,并且融合结果对其他目标的判别概率几乎没有影响。而且相对于[8]中的算法,本文的算法在每个融合周期的融合中都能减少一次D-S组合计算,大大减少了计算量。