循环中值平均滤除遥测地形粗差
来源:岁月联盟
时间:2010-08-30
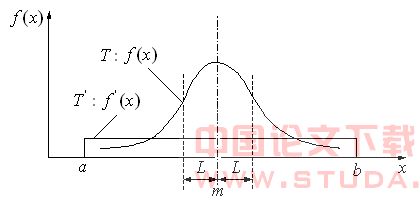 图 1 窗口数据的概率密度和判决门限 从图1可见,总体T和T’的分布往往是交迭的,无污染数据的判决门限界定为m±L,超出此范围的数据被判为脉冲噪声。对于两总体的交迭分布,无论判决门限如何选取,总存在两种错误判决的可能:第一类错误:x∈T,却被误判为x∈T’,设其概率为P1;第二类错误:x∈T’,却被误判为x∈T,设其概率为P2。P1实质上表征了概率分类对信号数据的保护能力,而P2则是对概率分类检出脉冲噪声能力的度量。其定量描述为:
图 1 窗口数据的概率密度和判决门限 从图1可见,总体T和T’的分布往往是交迭的,无污染数据的判决门限界定为m±L,超出此范围的数据被判为脉冲噪声。对于两总体的交迭分布,无论判决门限如何选取,总存在两种错误判决的可能:第一类错误:x∈T,却被误判为x∈T’,设其概率为P1;第二类错误:x∈T’,却被误判为x∈T,设其概率为P2。P1实质上表征了概率分类对信号数据的保护能力,而P2则是对概率分类检出脉冲噪声能力的度量。其定量描述为: (1) 公式(1)中的φ是标准正态概率分布函数,由公式可得到P1、P2和L的定性关系:(1)在σ、Pn、a、b不变的前提下,L增大时,P1减小、P2增大;L减小时,P1增大、P2减小;无论L如何选取,都不可能同时减小P1和P2。(2)判决门限L的选取与总体T的方差有很大关系,在保持P1不变的前提下,T的方差σ越小,L值就越小。相对于整幅图像而言,局部总体T由于离散程度σ较小,因而在一定的P1下使得L较小,可获得较小的P2。由于图像的总错分概率是所有局部错分概率的平均,因而采用局部概率分类能获得比全局概率分类更优的检噪效果。 为方便,固定各窗口的门限比常数R=L/σ,并根据统计推断原则将R取为2σ~3σ,这样可使得仅约0.26%~5%的数据点将被作为脉冲噪声进行平滑处理。这样,在脉冲噪声密度不高的情形下(高精度数据采集传感器工作在正常情况下),检噪算法对于未污染数据的保护性能较好。对于各滤波窗口中心点,用局部概率分类法进行噪声判断,需要估计局部均值m和局部方差σ,本文采用循环中值平均方法实现局部参数估计。3 基于循环中值平均进行检噪平滑对用于地形辅助导航的激光图像进行粗差滤波的要求是既能去除图像以外的脉冲噪声,同时又要保持图像的细节不被改变;此外还要求算法实时性强。AFND算法虽有较好的滤波效果,但涉及指数和迭代运算,运算速度低。中值滤波是最常用和简单的粗差滤波方法,但与以上激光像滤波要求相比也有差距。第一,中值滤波法及其改进型[7][8]虽能减少图像中的脉冲噪声,但同时也改变了有效的图像数据。对此,[5]采用了先进行噪声判断,再作针对性处理的方法。第二,中值滤波需要大量的排序操作,实时性还不够好。对此,文献[3]采用的方法是取窗口中除去最大和最小值之后的中间数据的平均来代替中值。从这两种方法得到启发,提出利用中值平均进行局部参数估计,并进行统计法检噪滤波的方法,算法如下:(1)以当前输入检噪点I(i , j)为中心选取n×n的窗口(一般可取3×3窗口);(2)找出窗内的最大值max、最小值min,并出窗内所有像点值之和S以及像点值平方和S2;(3)用窗内中段数据估计窗口非噪声数据的均值: m=(S-max-min)/(n×n-2);(4)用窗内中段数据估计窗口非噪声数据的方差: σ=(S2-max2-min2)/(n×n-2)-m2;(5)粗差检测和平滑输出: 如果 |I(i,j)-m|>2×σ:则输出O (i , j)=m 否则:输出O (i , j)=I(i , j)该算法假设在一个滤波窗口内的高值脉冲和低值脉冲数量各不超过一个,当窗内脉冲数量不符合这一假设时,均值和方差估计误差增大,造成漏检。但由于每次估计都排除了最强脉冲的干扰,使估计更接近理想并检测平滑一定数量的噪声,如果反复执行这一过程,参数估计误差将趋于下降,滤波效果得到提高。因此设置了循环滤波方案,即当第一轮滤波检测出的噪声点总数与图像总像点数之比大于某一数值(循环阈值)时,进行第二轮滤波。以下为讨论方便,称这种方法为CMAND算法(Circular Median Average for Noise Detecting)。理论上,3×3的滤波窗口适合于粗差点的密度小于10%的情形,考虑到噪声分布位置的不均匀并通过实验,将循环阈值设置为0.05。4 实验结果及讨论为了检验CMAND算法的性能,利用两组受到脉冲噪声不同程度污染的激光地形测距图像(见图2、图3所示,以灰度高低表示距离远近)将CMAND算法与其他算法进行滤波性能比较。由于从视觉直观上看不出各种滤波算法在处理效果上的明显差异,为了综合衡量滤波算法的数据保护和去噪效果,采用滤波信噪比增益(GSNR)作为滤波效果的客观评价性能指标,GSNR定义为滤波器输出信噪比与输入信噪比的比值,当噪声总能量远小于信号能量时,GSNR简化为输入噪声功率与输出噪声功率之比,即:
(1) 公式(1)中的φ是标准正态概率分布函数,由公式可得到P1、P2和L的定性关系:(1)在σ、Pn、a、b不变的前提下,L增大时,P1减小、P2增大;L减小时,P1增大、P2减小;无论L如何选取,都不可能同时减小P1和P2。(2)判决门限L的选取与总体T的方差有很大关系,在保持P1不变的前提下,T的方差σ越小,L值就越小。相对于整幅图像而言,局部总体T由于离散程度σ较小,因而在一定的P1下使得L较小,可获得较小的P2。由于图像的总错分概率是所有局部错分概率的平均,因而采用局部概率分类能获得比全局概率分类更优的检噪效果。 为方便,固定各窗口的门限比常数R=L/σ,并根据统计推断原则将R取为2σ~3σ,这样可使得仅约0.26%~5%的数据点将被作为脉冲噪声进行平滑处理。这样,在脉冲噪声密度不高的情形下(高精度数据采集传感器工作在正常情况下),检噪算法对于未污染数据的保护性能较好。对于各滤波窗口中心点,用局部概率分类法进行噪声判断,需要估计局部均值m和局部方差σ,本文采用循环中值平均方法实现局部参数估计。3 基于循环中值平均进行检噪平滑对用于地形辅助导航的激光图像进行粗差滤波的要求是既能去除图像以外的脉冲噪声,同时又要保持图像的细节不被改变;此外还要求算法实时性强。AFND算法虽有较好的滤波效果,但涉及指数和迭代运算,运算速度低。中值滤波是最常用和简单的粗差滤波方法,但与以上激光像滤波要求相比也有差距。第一,中值滤波法及其改进型[7][8]虽能减少图像中的脉冲噪声,但同时也改变了有效的图像数据。对此,[5]采用了先进行噪声判断,再作针对性处理的方法。第二,中值滤波需要大量的排序操作,实时性还不够好。对此,文献[3]采用的方法是取窗口中除去最大和最小值之后的中间数据的平均来代替中值。从这两种方法得到启发,提出利用中值平均进行局部参数估计,并进行统计法检噪滤波的方法,算法如下:(1)以当前输入检噪点I(i , j)为中心选取n×n的窗口(一般可取3×3窗口);(2)找出窗内的最大值max、最小值min,并出窗内所有像点值之和S以及像点值平方和S2;(3)用窗内中段数据估计窗口非噪声数据的均值: m=(S-max-min)/(n×n-2);(4)用窗内中段数据估计窗口非噪声数据的方差: σ=(S2-max2-min2)/(n×n-2)-m2;(5)粗差检测和平滑输出: 如果 |I(i,j)-m|>2×σ:则输出O (i , j)=m 否则:输出O (i , j)=I(i , j)该算法假设在一个滤波窗口内的高值脉冲和低值脉冲数量各不超过一个,当窗内脉冲数量不符合这一假设时,均值和方差估计误差增大,造成漏检。但由于每次估计都排除了最强脉冲的干扰,使估计更接近理想并检测平滑一定数量的噪声,如果反复执行这一过程,参数估计误差将趋于下降,滤波效果得到提高。因此设置了循环滤波方案,即当第一轮滤波检测出的噪声点总数与图像总像点数之比大于某一数值(循环阈值)时,进行第二轮滤波。以下为讨论方便,称这种方法为CMAND算法(Circular Median Average for Noise Detecting)。理论上,3×3的滤波窗口适合于粗差点的密度小于10%的情形,考虑到噪声分布位置的不均匀并通过实验,将循环阈值设置为0.05。4 实验结果及讨论为了检验CMAND算法的性能,利用两组受到脉冲噪声不同程度污染的激光地形测距图像(见图2、图3所示,以灰度高低表示距离远近)将CMAND算法与其他算法进行滤波性能比较。由于从视觉直观上看不出各种滤波算法在处理效果上的明显差异,为了综合衡量滤波算法的数据保护和去噪效果,采用滤波信噪比增益(GSNR)作为滤波效果的客观评价性能指标,GSNR定义为滤波器输出信噪比与输入信噪比的比值,当噪声总能量远小于信号能量时,GSNR简化为输入噪声功率与输出噪声功率之比,即: 公式中x、xI、xo分别代表无污染图像、脉冲噪声污染图像和滤波输出图像的像点数据。
公式中x、xI、xo分别代表无污染图像、脉冲噪声污染图像和滤波输出图像的像点数据。 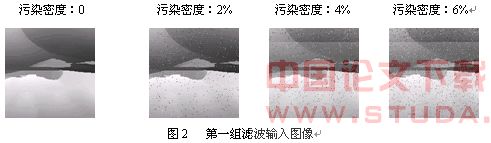
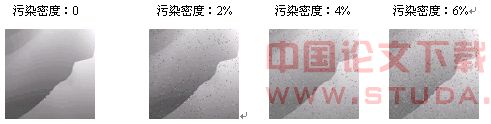 图2 第一组滤波输入图像 图2 第一组滤波输入图像 |
图3 第二组滤波输入图像采用各种滤波算法,分别对上述两组输入图像进行处理,输出图像的GSNR值对比见表1、表2所示。表中Median表示中值滤波,Laplacian表示拉普拉斯检测算子,FWA表示模糊加权均值滤波器[5],AFND表示自适应模糊检噪平滑算法[6],CMAND表示本文提出的循环中值平均检噪平滑算法。 表1 各种滤波器在不同粗差密度下的GSNR值(对图2滤波)
| DensityFilter | 1% | 2% | 4% | 6% | 8% | 10% | 12% | 16% | 20% |
| Median | 3.91 | 7.28 | 12.64 | 15.72 | 18.46 | 22.91 | 24.54 | 24.38 | 23.98 |
| Laplacian | 1.56 | 3.03 | 6.58 | 8.96 | 12.50 | 14.98 | 18.23 | 24.27 | 29.63 |
| FWA | 3.57 | 6.41 | 10.96 | 13.14 | 15.54 | 18.95 | 15.34 | 12.68 | 12.34 |
| AFND | 5.71 | 12.53 | 21.16 | 23.83 | 27.14 | 42.09 | 29.34 | 25.89 | 19.60 |
| CMAND | 12.19 | 26.00 | 31.14 | 39.17 | 47.92 | 54.59 | 26.42 | 30.16 | 18.19 |
| DensityFilter | 1% | 2% | 4% | 6% | 8% | 10% | 12% | 16% | 20% |
| Median | 9.17 | 17.04 | 27.54 | 34.70 | 44.33 | 39.35 | 29.90 | 39.31 | 40.74 |
| Laplacian | 2.28 | 4.45 | 8.82 | 13.74 | 17.10 | 22.58 | 26.65 | 34.16 | 40.74 |
| FWA | 13.19 | 24.21 | 43.01 | 42.68 | 60.34 | 33.05 | 30.39 | 24.83 | 18.29 |
| AFND | 19.75 | 37.62 | 58.23 | 71.94 | 87.01 | 72.83 | 59.14 | 46.96 | 28.18 |
| CMAND | 44.68 | 70.59 | 99.38 | 114.1 | 105.3 | 128.8 | 59.22 | 40.23 | 43.30 |