三维彩色逆向工程技术研究
来源:岁月联盟
时间:2010-08-30
1 引言
通过二十年的,逆向工程已经取得了很大的进展,在模具制造业、玩具业、游戏业、业、鞋业、业、医学工程及产品造型设计等方面发挥了重要作用[1]。但是,随着技术的蓬勃发展,在多媒体、游戏业、动画业、医学以及古文物和艺术品的数字化等方面,目前的单色三维逆向技术已不能满足需求,在这种情况下,彩色三维数字化和数据处理系统开始蓬勃发展,三维彩色逆向工程技术成为逆向工程研究中非常活跃的一个分支。2 系统组成
逆向工程中的测量系统分为接触式测量和非接触式测量,由于非接触式测量有着众多优点,是现在逆向工程测量系统研究的重点,目前普遍使用的是单色结构光测量系统,它采用两个黑白CCD摄像机,从不同角度得到待测物体的二维图像,利用双目视差原理,获得待测物体的深度信息。由此得到物体表面各个点的三维坐标[2]。 在当前单色非接触式结构光测量系统的基础上,采用彩色CCD摄像机,运用彩色信息提取技术,得到三维物体的彩色信息(R,G,B分量),再与物体表面点的空间坐标匹配,从而得到物体表面点的六维信息(X,Y,Z,R,G,B),生成彩色点云文件,为三维彩色模型重构提供数据基础。 系统主要组成部分(参见图1): ①彩色CCD摄像机;②三维标定靶;③编码光栅投射装置;④图像采集卡;⑤PC机。 测量系统的采集部分由一个编码光栅投射器和两个彩色CCD摄像机组成,投射器固定于中央,两台摄像机分布于两侧。首先,投射器直接投射面结构光栅到测量物体表面,两侧的彩色CCD摄像机摄取物体的二维图像,接着,关闭投射器,在光照明情况下,由左右摄像机摄取测量物体二维彩色图像。摄像机采集的信号经采集卡转换后进入PC机进行后续处理。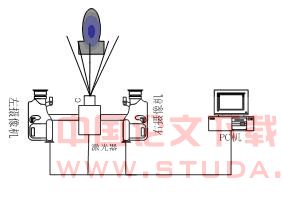 图1 测量系统模型
图1 测量系统模型3 三维彩色逆向工程关键技术
3.1 摄像机标定
由机器视觉知识可知,通过双目摄像机获得待测物体的三维信息,就必须确定摄像机的内外参数及畸变系数。这项工作可以通过对左右摄像机进行标定得以完成。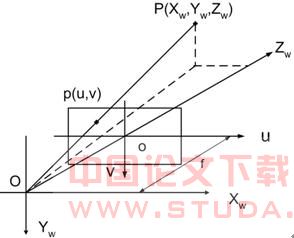 图2 摄像机模型 摄像机模型[3](参见图2)中的映射关系: 世界坐标系一点P(Xw,Yw,Zw)在摄像机图像坐标系中映射为p(u,v),两者的坐标有如下关系:
图2 摄像机模型 摄像机模型[3](参见图2)中的映射关系: 世界坐标系一点P(Xw,Yw,Zw)在摄像机图像坐标系中映射为p(u,v),两者的坐标有如下关系:
其中:
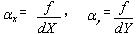 ,f为摄像机的有效焦距,dX,dY为像素之间水平和垂直方向的距离, (u0,v0)为主点在机图像坐标系中的坐标,R为3×3旋转矩阵,t= (tx, ty, tz)T为平移矩阵,标定的结果就是得到上述几个参数。 对于摄像机标定的方法,现在研究的比较成熟,其中Tsai(1986)提出的基于径向约束的两步法[4]是研究的重点,本文基于Tsai的RAC两步法完成摄像机的标定,设左摄像机位于世界坐标系原点,且无旋转,右摄像机相对世界坐标系的旋转矩阵
,f为摄像机的有效焦距,dX,dY为像素之间水平和垂直方向的距离, (u0,v0)为主点在机图像坐标系中的坐标,R为3×3旋转矩阵,t= (tx, ty, tz)T为平移矩阵,标定的结果就是得到上述几个参数。 对于摄像机标定的方法,现在研究的比较成熟,其中Tsai(1986)提出的基于径向约束的两步法[4]是研究的重点,本文基于Tsai的RAC两步法完成摄像机的标定,设左摄像机位于世界坐标系原点,且无旋转,右摄像机相对世界坐标系的旋转矩阵 ,平移矩阵T= (Tx, Ty, Tz)T,通过RAC两步法求出左右摄像机的内外参数。
,平移矩阵T= (Tx, Ty, Tz)T,通过RAC两步法求出左右摄像机的内外参数。3.2 采集表面点六维信息(XwYwZwRGB)
在左右CCD摄像机分别获得三维物体的二维彩色图像后,关键是如何通过匹配得到物体的三维信息和彩色信息。 1)三维信息的获取 目前,立体匹配的算法主要分为两大类:区域匹配和特征匹配[5]。区域匹配对图像中各像素点周围的图像子区域进行灰度相关运算,通过相关值来确定匹配关系,这种匹配可以得到密集的视差图,但这种算法存在①计算量大,速度慢。②匹配窗口大小选择困难。③对仿射畸变和辐射畸变敏感等缺陷。特征匹配通常选择边缘、角点等特征点作为匹配点,因此特征匹配算法①匹配速度较快。②特征匹配精度较高(亚像素级)。但这种算法只能得到稀疏视差图。综合上述两种方法的优缺点,本文采用混合算法,即分步利用特征匹配和区域匹配两种方法进行匹配。 基本步骤是: (1)对左右两个彩色CCD摄像机获得彩色二维图像(BMP)进行灰度化处理,并进行必要的图像预处理[6](均值滤波、高斯滤波、直方图均衡化、拉普拉斯锐化)消除噪声。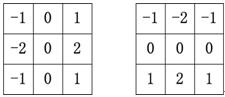 图3 Sobel算子 (2)特征匹配需要特征点,采用如图3所示的Sobel算子对左右图像进行卷积运算[7],把图像像素点梯度▽f(x,y)大于某一选定阈值的点作为边缘特征点,得到待测物体的左右边缘特征点图。 (3)采用双向匹配法[8]对左右边缘特征图中的边缘特征点进行匹配,首先选取左图中的边缘特征点,根据灰度、梯度、方向、极线等约束条件,和右图中的特征点匹配,然后再选取右图中的边缘特征点和左图中的特征点匹配,最后选择双向都是最优匹配点的点对作为最终匹配点,得到边缘特征点的视差图。 (4)上一步骤只是得到边缘点的稀疏视差图,为了得到密集的视差图,需要对大量非边缘点进行区域匹配,步骤⑶得到边缘特征点实际上把左右图像分割成许多小区域,这就大大缩小了区域匹配的搜索空间,从而提高了匹配的效率和准确程度。左图中一点m(i,j),在右图中找其对应的匹配点,使用M×N的相关窗口,使窗口位于m处,在右图中,在同一条水平线搜寻匹配点n,使用协方差系数[9]来衡量m,n之间的相似程度,最终找到最佳匹配点。 (5)通过上面四个步骤,可以得到待测物体表面各个点P在左右摄像机图像上映射点(Pl,Pr)的对应关系,以及左右两个映射点的图像坐标Pl(Xl, Yl),Pr (Xr,Yr),由标定得到的有效焦距fl,fr以及旋转矩阵R和平移矩阵T进行,可以得到待测物体表面各个点的三维坐标(Xw,Yw,Zw)。计算公式如下:
图3 Sobel算子 (2)特征匹配需要特征点,采用如图3所示的Sobel算子对左右图像进行卷积运算[7],把图像像素点梯度▽f(x,y)大于某一选定阈值的点作为边缘特征点,得到待测物体的左右边缘特征点图。 (3)采用双向匹配法[8]对左右边缘特征图中的边缘特征点进行匹配,首先选取左图中的边缘特征点,根据灰度、梯度、方向、极线等约束条件,和右图中的特征点匹配,然后再选取右图中的边缘特征点和左图中的特征点匹配,最后选择双向都是最优匹配点的点对作为最终匹配点,得到边缘特征点的视差图。 (4)上一步骤只是得到边缘点的稀疏视差图,为了得到密集的视差图,需要对大量非边缘点进行区域匹配,步骤⑶得到边缘特征点实际上把左右图像分割成许多小区域,这就大大缩小了区域匹配的搜索空间,从而提高了匹配的效率和准确程度。左图中一点m(i,j),在右图中找其对应的匹配点,使用M×N的相关窗口,使窗口位于m处,在右图中,在同一条水平线搜寻匹配点n,使用协方差系数[9]来衡量m,n之间的相似程度,最终找到最佳匹配点。 (5)通过上面四个步骤,可以得到待测物体表面各个点P在左右摄像机图像上映射点(Pl,Pr)的对应关系,以及左右两个映射点的图像坐标Pl(Xl, Yl),Pr (Xr,Yr),由标定得到的有效焦距fl,fr以及旋转矩阵R和平移矩阵T进行,可以得到待测物体表面各个点的三维坐标(Xw,Yw,Zw)。计算公式如下: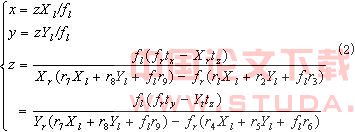
 图4 BMP文件结构示意图 设BMP文件的大小(字节)为SIZE,图像上某点p(u,v)。点在文件中的字节位置为POS,则:
图4 BMP文件结构示意图 设BMP文件的大小(字节)为SIZE,图像上某点p(u,v)。点在文件中的字节位置为POS,则:
4 结束语
目前,三维彩色逆向技术正在蓬勃,本文在单色非接触结构光测量系统的基础上,采用彩色CCD摄像机获取测量物体的彩色图像,综合运用机器视觉和图像处理技术,为获得测量物体的彩色点云数据提供了一种方法,也是对三维彩色逆向工程技术研究的一种有益尝试。[1]金涛,童水光.逆向工程技术[M].北京:机械出版社,2003:26-65[2]徐红兵,任乃飞.ATOS流动式光学扫描仪的工作原理与系统标定[J].工具技术,2006年第40卷[3]张广军.机器视觉[M].北京:出版社,2005:24-17[4]ROGER Y. TSAI.A Versatile Camera Calibration Techniaue forHigh-Accuracy 3D Machine Vision MetrologyUsing Off-the-shelf TV Cameras and Lenses。IEEE JOURNAL OF ROBOTICS AND AUTOMATION[J],VOL. RA-3, NO. 4,AUGUST 1987[5]徐奕,周军,周源华.立体视觉匹配技术[J].计算机工程与应用,2003.15[6]李弼程、彭天强,彭波等.智能图像处理技术[M].北京:工业出版社,2004:61-95[7]周长发.Visual C++图像处理编程[M]. 北京:电子工业出版社,2006:290-293[8]刘正东,孙权森,杨静宇.基于特征约束及区域相关的体视匹配方法[J].计算机工程与应用,2003.34[9]廖素英,杨华军.基于区域相关的动态匹配方法.[J].光电工程,2004.12[10]吕凤军.数字图象处理编程入门[M].北京:清华大学出版社,1999下一篇:一种基于互信息的规则约简方法