车辆导航及监控系统设计研究
来源:岁月联盟
时间:2010-08-30
2 系统总体设计
2.1 设计思路及结构划分
系统的设计首先从车辆的定位着眼,进而完成对其进行监控导航等功能,因此需要结合当前应用广泛的GPS、GIS、GSM及计算机通信等方面的技术。在具体运行中设置在车辆上的终端部件将从GPS接收坐标数据,并结合速度等信息通过GSM系统以SMS方式发送到控制中心,控制中心则要结合其后台的GIS系统以图像方式表现在屏幕上,同时又要根据需要对车辆通过GSM系统以SMS方式发送控制指令。另外为了方便用户查询用户基本信息、交通信息、车辆行驶信息等,控制中心还要实时向WEBGIS服务器传送相关信息。由此,我们对该系统的设计主要分为了车载单元和监控中心两大部分。2.2 控制中心端设计
控制中心端是我们整个系统的核心部分,它既要接收来自移动端的GPS信息并结合数据库以图形方式反映在GIS平台上,同时又要根据监控信息给车辆以相应的信息反馈,以提供车辆的导航。其功能结构如图1。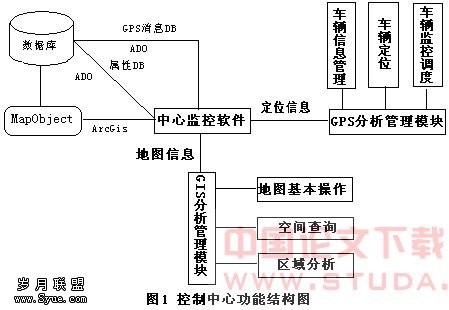 (1)数据库设计。系统对数据的要求包括地理空间数据和非空间数据,非空间数据又包括基本的属性数据和GPS数据,因此建立了三个数据库分别是地理空间数据库、属性数据库和GPS消息数据库。其中地理空间数据库主要存储GIS方面的空间图形数据,此处以成都市电子交通地图为主要部分,包括道路交通网图形要素的空间位置、几何特征和拓扑关系以及其它一些附属地物,如机关单位、绿地广场、商店超市等。属性数据库主要包括车辆基本信息、用户信息、服务信息等。GPS消息数据库主要针对车辆位置信息的管理,以方便车辆导航及路径回放等。后两者均为结构化数据,采用一般的关系数据库以表、视图方式即可很好的表示。 (2)GPS分析管理模块。此模块主要从车辆的定位、跟踪方面进行处理,对被监控车辆接收移动端发来的位置、速度等信息以图形方式显示在地图上,并以文本方式做详细记录;依据记录的数据在需要时进行回放,回放功能的设计上包括开始、暂停、继续、结束四个状态。另外还包括基本的车辆信息查询处理功能,如车辆信息查询、驾驶员信息查询、车辆监控查询、车辆调度等。 (3)GIS分析管理模块。此模块主要在MapObject基础上集成二次开发,实现GIS的基本功能,如地图放大、缩小、漫游、查询、距离测量等。另外根据项目需要实现了路段及区域范围内车辆密度分析功能。
(1)数据库设计。系统对数据的要求包括地理空间数据和非空间数据,非空间数据又包括基本的属性数据和GPS数据,因此建立了三个数据库分别是地理空间数据库、属性数据库和GPS消息数据库。其中地理空间数据库主要存储GIS方面的空间图形数据,此处以成都市电子交通地图为主要部分,包括道路交通网图形要素的空间位置、几何特征和拓扑关系以及其它一些附属地物,如机关单位、绿地广场、商店超市等。属性数据库主要包括车辆基本信息、用户信息、服务信息等。GPS消息数据库主要针对车辆位置信息的管理,以方便车辆导航及路径回放等。后两者均为结构化数据,采用一般的关系数据库以表、视图方式即可很好的表示。 (2)GPS分析管理模块。此模块主要从车辆的定位、跟踪方面进行处理,对被监控车辆接收移动端发来的位置、速度等信息以图形方式显示在地图上,并以文本方式做详细记录;依据记录的数据在需要时进行回放,回放功能的设计上包括开始、暂停、继续、结束四个状态。另外还包括基本的车辆信息查询处理功能,如车辆信息查询、驾驶员信息查询、车辆监控查询、车辆调度等。 (3)GIS分析管理模块。此模块主要在MapObject基础上集成二次开发,实现GIS的基本功能,如地图放大、缩小、漫游、查询、距离测量等。另外根据项目需要实现了路段及区域范围内车辆密度分析功能。2.3 移动端设计
移动端也就是我们的车载端系统,它包括GPS接收模块、DR传感器(Dead Reckoning)、车载导航计算机、通信控制器及外围设备等组成,其结构如图2。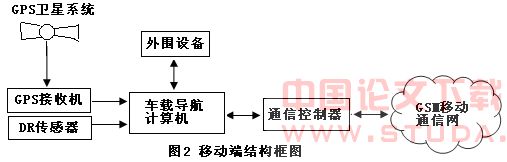 GPS接收机主要用于接收卫星信号,并解算出定位信息;DR传感器用于航位推算,它是为了解决GPS无法定位而导致导航软件无法工作的问题而特意在我们的系统中引入的;车载导航计算机用于数据采集和处理;通信控制器用于向GSM短信中心发送车辆位置等数据,并接收控制中心通过GSM网发来的监控指令等数据。其工作原理为:当GPS接收模块或DR传感器取得数据后,通过通信控制器把数据以短信息的形式传到GSM短信中心,再通过局域网或广域网把数据传到监控中心,车载终端系统以中断方式完成来自GPS模块和DR传感器的数据的接收,在硬件主程序中循环采集信号和控制其它外围设备。
GPS接收机主要用于接收卫星信号,并解算出定位信息;DR传感器用于航位推算,它是为了解决GPS无法定位而导致导航软件无法工作的问题而特意在我们的系统中引入的;车载导航计算机用于数据采集和处理;通信控制器用于向GSM短信中心发送车辆位置等数据,并接收控制中心通过GSM网发来的监控指令等数据。其工作原理为:当GPS接收模块或DR传感器取得数据后,通过通信控制器把数据以短信息的形式传到GSM短信中心,再通过局域网或广域网把数据传到监控中心,车载终端系统以中断方式完成来自GPS模块和DR传感器的数据的接收,在硬件主程序中循环采集信号和控制其它外围设备。 3 系统关键技术与实现
3.1 通信
 车载设备与监控中心的通信方式采用GSM短信业务方式完成。发送端将数据加上目的地址按照通讯机协议进行编码发送给短消息服务中心,之后再由短消息服务中心发送给监控中心。监控中心收到信息后同样以相应的通讯协议进行解码后分解为可识别的车辆经纬度、状态等信息。他们之间是以RS232全双工串口来通信的,可以同时接受和发送数据。在此我们利用VC++6.0下的CserialPortEx串口通行类来实现串口通信。CserialPortEx声明如下class CSerialPortEx{ public: BOOL InitPort(CWnd* pPortOwner, UINT portnr = 1, UINT baud = 19200, char parity = 'N', UINT databits = 8, UINT stopsbits = 1, DWORD dwCommEvents = EV_RXCHAR | EV_CTS, UINT nBufferSize = 512);}串口的配置对话框如图3。
车载设备与监控中心的通信方式采用GSM短信业务方式完成。发送端将数据加上目的地址按照通讯机协议进行编码发送给短消息服务中心,之后再由短消息服务中心发送给监控中心。监控中心收到信息后同样以相应的通讯协议进行解码后分解为可识别的车辆经纬度、状态等信息。他们之间是以RS232全双工串口来通信的,可以同时接受和发送数据。在此我们利用VC++6.0下的CserialPortEx串口通行类来实现串口通信。CserialPortEx声明如下class CSerialPortEx{ public: BOOL InitPort(CWnd* pPortOwner, UINT portnr = 1, UINT baud = 19200, char parity = 'N', UINT databits = 8, UINT stopsbits = 1, DWORD dwCommEvents = EV_RXCHAR | EV_CTS, UINT nBufferSize = 512);}串口的配置对话框如图3。3.2 地图匹配
由于当前使用的GPS定位精度为数十米,且美国军方为限制其它国家将GPS系统用于军事领域,通过选择可用性(SA)技术,人为地在卫星信号中加入噪声干扰。另外由于城市地物特征复杂,在高密集的建筑物、隧道、立交桥等处行驶时又会受其反射和遮蔽影响,使得在某些区域内无法接收GPS信号而出现定位盲区。因此在GPS定位与航位推算的基础上要将定位点与地图道路进行匹配,这样才能真正实现车辆在地图上的实时定位。 地图匹配是通过车辆的GPS航迹与GIS地图数据库中的矢量化路段对象进行匹配,寻找车辆当前行使的实际道路,再将此定位点投影到道路上。根据车辆行驶的情况和地图匹配的需要,将匹配定位分成了3种不同状态,即道路搜索、直线行驶、转弯。针对每种状态的特点和定位要求,采取了不同的处理方法。 (1)道路搜索。当车辆启动时,道路匹配可能不正确,所以应先对起始时刻进行道路匹配,以便建立正确的投影点,这就需要先进行道路搜索。在进行道路搜索时我们将道路连通性作为考虑要素,如图4所示:p0是前一时刻匹配的位置点,p1是当前时刻的GPS定位点,L1、L2、L3是待搜索的范围内的三条道路。虚线箭头是p0 时刻车辆行使方向。根据前一时刻匹配结果认为车辆在道路L1上,由于道路L1与L2是连通的,所以车辆不可能直接进入L3,只可能是在L1和L2中进行搜索。 (2)直线行驶。在没有接近道路交叉点时,可以一直认为车辆是在此道路上行驶,可将定位点全部投影在此路段上,如图5。
(2)直线行驶。在没有接近道路交叉点时,可以一直认为车辆是在此道路上行驶,可将定位点全部投影在此路段上,如图5。 (3)转弯。当接近交叉点时进行转弯处理。此时可认为是新一次的道路搜索,采用道路搜索的算法处理即可。
(3)转弯。当接近交叉点时进行转弯处理。此时可认为是新一次的道路搜索,采用道路搜索的算法处理即可。4 结束语
基于GPS/GIS/GSP车辆实时监控导航管理系统涉及GPS技术、通信技术、地理信息学、数据库、软件工程等多个技术领域,系统较为复杂,本文从系统的整体结构、原理、功能、关键技术算法等方面对车辆导航监控系统做了一定分析研究。具体论述应对车辆定位、导航、监控等领域具有实用价值。1 谭国真,赵亦林. 车辆定位与导航系统[M] 北京:出版社,1999.2 刘光. 地理信息系统二次开发教程(组件篇)[M]. 北京:清华大学出版社,2003.3 吴信才. 地理信息系统的设计与实现[M] 北京:电子下业出版社,2002.4 陈效忠,张孝祖. 基于GPRS的GPS/DR车辆组合导航的研究[J] 汽车电器,2005.125 杜诚 徐志根 基于PDA的GPS车辆监控系统[J]. 成都信息工程学院学报,2005.2
上一篇:存储系统集中监控管理系统设计
下一篇:智能客户端离线处理的分析与实现