基于VC的连续挤压机主轴转速的动态曲线的实现
来源:岁月联盟
时间:2010-08-30
1 引言
随着连续挤压技术的不断,连续挤压机的自动化控制技术也在不断的进步,从过去的按钮操作逐渐发展为机与触摸屏技术相结合的可视化操作。对于连续挤压机,其主轴的转速的快慢会直接影响产品的质量和生产效率,所以,如何能够准确的监测主轴的转速变得十分重要。过去,我们通常凭借经验来调节主轴转速,由于在生产过程中,主轴的转速受到许多因素的影响,其实际转速并非我们想要得到理想转速。因此,本文主要利用VC++及其MSComm控件编程,来实现对连续挤压机主轴转速的实时监控,并利用动态曲线图实时输出。2 程序的实现
在实现对主轴转速实时监控中,我们采用的是Microsoft公司提供的ActiveX控件MicrosoftCommunicationsControl来实现串口编程,完成对挤压机的监控。MSComm控件必须有一个可以寄身的对话框,然后从对话框工具栏中把控件图拖入对话框中。在本程序中,动态数据曲线是在窗口的View类中实现的,所以我们要建立一个基于单文档的MFC应用程序来实现动态数据曲线的显示。而对话框工具栏上的图标是不能拖到视图(View)中,因此我们可以把MSComm控件拖入到单文档(SDI)的ABOUT对话框中,进而实现其功能。具体步骤如下:2.1 建立单文档程序工程并插入MSComm控件
利用MFC向导建立基于单文档应用程序VCurve(选择其基类为CScrollView),然后单击菜单Add To Project->Commponents and Controls...->Registered Active Controls->Microsoft Communications Control,V6.0,在单击INSERT即可插入MSComm控件。2.2 在ABOUT对话框中拖入MSComm控件
在ResourceView中选择IDD_ABOUTBOX 对话框,见MSComm控件图标拖入对话框中,控件ID号保持缺省的IDC_MSCOMM1。2.3 添加串口事件消息处理函数OnComm()
我们知道,在基于对话框的应用程序中,消息处理函数的添加都是由MFC的ClassWizard自动实现,但在这里我们必须手动添加。2.4 串口的初始化
利用ClassWizard为CVCurve类添加消息处理函数WM_CREATE,利用该函数来实现串口的初始化。Int CVCurveView::OnCreate(LPCREATESTRUCT lpCreateStruct) { m_mscomm.Create(NULL,0,CRect(0,0,0,0),this,IDC_MSCOMM1); m_mscomm.SetCommPort(DK);//选择端口 m_mscomm.SetSettings("9600,e,7,1"); m_mscomm.SetInputMode(1); //以二进制方式读写数据 m_mscomm.SetInBufferSize(1024); m_mscomm.SetOutBufferSize(1024); m_mscomm.SetInputLen(0); m_mscomm.SetRThreshold(1); SetTimer(1,1000,NULL);//定时器1 } 上述程序中,端口号DK可有操作员自己选择,这样就可以避免因端口号固定给工作带来不便。根据实际情况,选择合适的输入、输出缓冲区大小,这里均用1024。设置一个定时器,来实现对主轴转速的实时监控。2.5 从串口中接受数据并显示在窗口内
MSComm控件提供了两种通信问题的方法:事件驱动和查询法。这里我们选用的是事件驱动方法,它主要是对程序的响应及时,可靠性高。对于MSComm控件的事件,通常在串口事件消息处理函数OnComm()中进行处理。int CVCurveView::OnComm(){VARIANT inp;COleSafeArray safearray_inp; if(m_mscomm.GetCommEvent()==2) //事件值为2表示接收缓冲区内有字符{inp=m_mscomm.GetInput(); safearray_inp=inp; len=safearray_inp.GetOneDimSize();for(k=0;k<len;k++) safearray_inp.GetElement(&k,rxdata+k);//转换为BYTE型数组for(k=0;k<len;k++) { BYTE bt=*(int*)(rxdata+k); strtemp.Format("%c",bt); m_str+=strtemp; } n1=m_str.Find(0x02);n2=m_str.Find(0x03);for(n1=n1+1;n1<n2;n1++)m_readstr+=m_str.GetAt(n1);//提取有效的数据m_readstr=m_readstr.Right(2)+m_readstr.Left(2); } readdata=Str2Dec(m_readstr);//把16进制字符串转化为十进制数 itoa(readdata,strs,10); CClientDC *pDC=new CClientDC(this); pDC->TextOut(300,0,m_s); return readdata; } 在此函数中,主要是用来从串口中接受数据,然后取出有效的数据显示在View 窗口内。上位机从下位机中接收到的是16进制的字符串,在VC++ 中没有直接将16进制字符串转化为10进制的函数,所以要调用Str2Dec()函数来完成数据的转化。2.6 在OnDraw()函数中实现坐标轴的绘制及速度动态曲线图的保存
void CVCurveView::OnDraw(CDC* pDC){ //绘制Y轴 pDC->MoveTo((int)x0,0);pDC->LineTo((int)x0,rect.bottom);//绘制X轴pDC->MoveTo((int)x0,(int)y0);pDC->LineTo(sz.cx,(int)y0); //绘制Y轴方向的平行线int index=0;for(int i=0;i<160;i++)//绘制垂直实、虚等距线{ index=!index; if(index) { m_oldpen=pDC->SelectObject(&m_pen); } else { p_pen=pDC->SelectObject(&pen); } pDC->MoveTo((int)x0+(i+1)*dx,0); pDC->LineTo((int)x0+(i+1)*dx,rect.bottom); if(i>0&&i<20) { pDC->MoveTo((int)x0,rect.bottom-(int)y0-i*dx); pDC->LineTo((int)sz.cx,rect.bottom-(int)y0- i*dx); pDC->MoveTo((int)x0,(int)y0+i*dx); pDC->LineTo((int)sz.cx,(int)y0+i*dx); } }for(int j=0;j<m_ptarray.GetSize();j++)//速度曲线的保存{pDC->MoveTo(((CDraw*)m_ptarray.GetAt(j))->m_ptorig);pDC->LineTo(((CDraw*)m_ptarray.GetAt(j))->m_ptend);}} 上述函数主要实现了坐标轴的绘制,并且为了便于操作人员观察速度与随时间的关系,在坐标区域内绘制了实虚相间的平行于坐标轴的等距线。窗口的每次变化都会引起窗口的重绘,导致以前所绘图形的丢失,所以在此定义了一个通用的CDraw类和一个CPtrArray类型的变量m_ptarray用来保存绘制的曲线。2.7 实现速度的实时监控和坐标轴的移动
连续挤压机在工作中,由于受到外界各种条件例如电动机的电流、所挤压的材料的打滑等因素,都会引起主轴转速的改变,所以为了更好的监视主轴的转速,要不间断的对它进行数据采集。在程序中,通常是定义一个定时器来完成此操作。void CVCurveView::OnTimer(UINT nIDEvent) {switch(nIDEvent){case 1:str1=ch1+"0"+"008402"+ch2+"61"; //读取x40-x47的状态(X40) m_mscomm.SetOutput(COleVariant(str1)); Sleep(50); break;case 2: ncount++;SetScrollPos(SB_HORZ,ncount*dx);//实现y坐标轴移动InvalidateRect(CRect(0,0,cx,cy));pt=GetScrollPosition(); CClientDC *pDC=new CClientDC(this);x1+=dx;x_orig=x1+x0-dx;y=rect.bottom-y0-readdata;if(i==0)//绘制速度曲线图{ y_orig=y; pDC->MoveTo((int)x0-pt.x,(int)y_orig);}m_ptorig.x=(int)x_orig;m_ptorig.y=(int)y_orig;if(i!=0) pDC->MoveTo((int)x_orig-pt.x,(int)y_orig);y=rect.bottom-y0-readdata;x_end=x1+x0;y_end=y;pDC->LineTo((int)x_end-pt.x,(int)y_end);x_orig=x_end;y_orig=y_end;i=i++;m_ptend.x=(int)x_end;m_ptend.y=(int)y_end;CDraw *p_draw=new CDraw(m_ptorig,m_ptend);m_ptarray.Add(p_draw);break;}运行上述程序,可以得到如下的结果: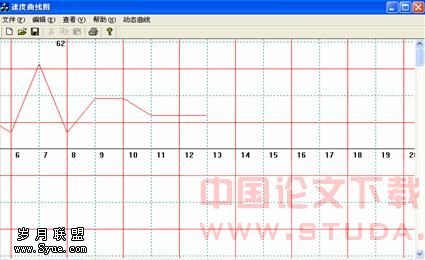
图中速度曲线随时间的变化不断向右延伸,而坐标轴刚好与其相反,相反方向移动。还可以在窗口中直接读取此时的主轴转速,如图中的“62”。