基于灰度特征和模板匹配的人眼定位
来源:岁月联盟
时间:2010-08-30
1 引言
人脸检测技术在身份识别、安全监控、图像与视频检索和智能人机接口等方面的广泛运用,已成为机视觉和模式识别领域内的热门研究课题。 广义来说,人脸检测可以分为两项内容,一项是人脸位置、大小和方向的确定;另一项是面部主要器官的定位,特别是人眼的定位。人眼作为人脸最显著的特征,比嘴、鼻能够提供更可靠、更重要的信息。 常用的人眼定位方法有阈值分割法[1]、灰度投影法[2]和模板匹配法[3]。阈值分割法首先对人脸的二值图像进行区域分割,然后设定一系列经验值和支持函数粗定位眼睛。该方法对于如人眼闭合、戴眼镜等一些情况定位效果较差。灰度投影法对人脸图像进行水平和垂直方向的投影,根据波峰波谷的分布信息来定位眼睛。这种方法定位速度较快,但波峰、波谷的分布对不同的人脸和姿态的变化非常敏感,因此定位精度较差,并且容易陷入局部最小而导致定位失败。模板匹配[5]是一种有效地模式识别技术,它能利用图像信息和有关识别模式的先验知识,更加直接地反映图像之间的相似度,传统的模板匹配方法首先要分别得到左眼和右眼模板,然后分别用左右眼模板在图像中进行匹配,得到两个相似度最大的点作为定位的眼睛,这种方法比较简单,但计算量较大,定位准确率较低。本文提出的人眼定位方法是通过寻找灰度图像中可能的眼睛区域并进行模板匹配来实现的。2 基于灰度特征的眼睛定位
在人脸的灰度图像中,由于眼睛虹膜、瞳孔和上眼框部位的灰度值明显比其邻近区域(眼部周围皮肤)灰度值要低[4]。因此在人脸图像中找出与实际眼睛大小相似且比其相邻区域灰度值低的区域作为可能的眼睛块;利用人脸器官分布的一些先验知识建立人眼位置的判定准则;如果一对可能的眼睛块大小在一定的范围内,而且满足人的双眼的几何关系,进一步确定为可能眼睛块。若 为图像的灰度值,设
为图像的灰度值,设 为左上坐标(x,y),大小为(h×w) 的图像块的像素平均值:
为左上坐标(x,y),大小为(h×w) 的图像块的像素平均值:
 相比较。 与 的值在双眼模板已知的情况下可以取为he和
相比较。 与 的值在双眼模板已知的情况下可以取为he和 ,he为双眼模板的高度,we为双眼模板的宽度。在不同的图像中,由于光照方向的不同,有可能使某一方向上的亮度稍大,导致灰度值偏高,因此一般只要求p(x,y)的值小于相邻的六个或六个以上的像素块的灰度值,就可以把它认为是可能的眼睛像素块。此时将输入图像二值化,可能的眼睛块区域值为1,其余区域值为0。 对得到的可能像素块,利用人脸器官分布的一些先验知识来进一步判定得到真正可能是眼睛的像素块。 (1)如果由可能的眼睛像素组成的图像块过大或过小,即由眼睛像素块组成的矩形高度大于2he,小于0.5he;或者宽度大于0.7we,小于0.15 we。这些图像块就不可能为眼睛块,因此这些相连像素被剔除。 (2)在眼睛区域中,其上下眼睑、瞳孔的灰度值相对比眼睛的其它区域低,这样通过像素块灰度值比较后,有一些眼睛附近的像素没有标记为可能的眼睛像素。因此如果一个像素周围有足够多的可能眼睛像素,则这个像素也被标记为可能眼睛像素。 (3)一般来说,人眼的长度与宽度的比值大约为0.5左右,利用这个条件,我们可以进一步剔除长宽比过大的图像块。 (4)人的两眼中心的连线的距离在0.5we 到we之间,且对于人的两眼连线来说,相对于水平方向的旋转角度在45°到135°之间。根据这两个条件,可以进一步得到可能的眼睛块。 两个可能眼睛块中心连线的距离通过计算它们中心的距离得到,对于一块可能的眼睛区域来说,可以看作是一个凸多边形,因此可以求出其质心。对于二进制图像,可以将其面积的中心看作是质心。其质心可由下式得到:
,he为双眼模板的高度,we为双眼模板的宽度。在不同的图像中,由于光照方向的不同,有可能使某一方向上的亮度稍大,导致灰度值偏高,因此一般只要求p(x,y)的值小于相邻的六个或六个以上的像素块的灰度值,就可以把它认为是可能的眼睛像素块。此时将输入图像二值化,可能的眼睛块区域值为1,其余区域值为0。 对得到的可能像素块,利用人脸器官分布的一些先验知识来进一步判定得到真正可能是眼睛的像素块。 (1)如果由可能的眼睛像素组成的图像块过大或过小,即由眼睛像素块组成的矩形高度大于2he,小于0.5he;或者宽度大于0.7we,小于0.15 we。这些图像块就不可能为眼睛块,因此这些相连像素被剔除。 (2)在眼睛区域中,其上下眼睑、瞳孔的灰度值相对比眼睛的其它区域低,这样通过像素块灰度值比较后,有一些眼睛附近的像素没有标记为可能的眼睛像素。因此如果一个像素周围有足够多的可能眼睛像素,则这个像素也被标记为可能眼睛像素。 (3)一般来说,人眼的长度与宽度的比值大约为0.5左右,利用这个条件,我们可以进一步剔除长宽比过大的图像块。 (4)人的两眼中心的连线的距离在0.5we 到we之间,且对于人的两眼连线来说,相对于水平方向的旋转角度在45°到135°之间。根据这两个条件,可以进一步得到可能的眼睛块。 两个可能眼睛块中心连线的距离通过计算它们中心的距离得到,对于一块可能的眼睛区域来说,可以看作是一个凸多边形,因此可以求出其质心。对于二进制图像,可以将其面积的中心看作是质心。其质心可由下式得到:
 ,灰度均值和方差分别为
,灰度均值和方差分别为 ;相应的输入图像区域的灰度矩阵为
;相应的输入图像区域的灰度矩阵为 ,灰度均值和方差分别为
,灰度均值和方差分别为 ,则二者的相关系数为:
,则二者的相关系数为:
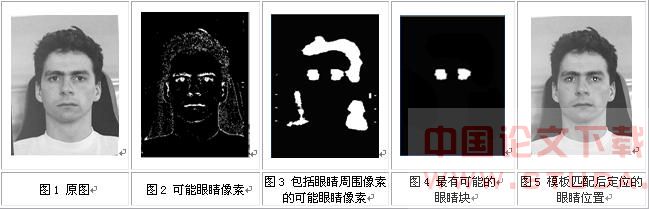
 描述了输入图像区域与模板间图像向量间的夹角,根据阈值的选取最后得到相关系数大于阀值的图像,进而得到图像中双眼的中心坐标,经过模板匹配后的结果如图5所示。
描述了输入图像区域与模板间图像向量间的夹角,根据阈值的选取最后得到相关系数大于阀值的图像,进而得到图像中双眼的中心坐标,经过模板匹配后的结果如图5所示。4 实验结果及分析
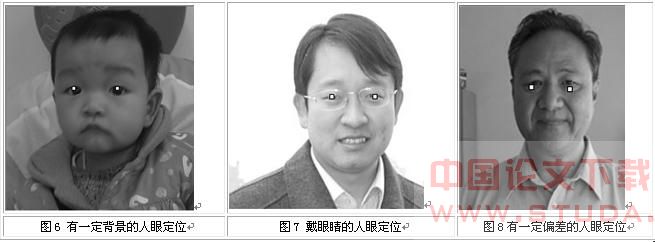
实验中对不同光照、不同姿态、不同背景的人脸图像进行测试,实验表明该方法对具有一定背景、戴眼睛的人脸基本能够定位,参见图6至图8。在某种情况下可能会出现人眼定位的偏差,主要原因是将眼睑部分也视为可能的眼睛块处理。